บทความ : ดร.กิตติพงศ์ เอกไชย และ ดร.ธีศิษฏ์ ลีลาสวัสดิ์สุข
ทีมวิจัยสมองกลอัจฉริยะและความจริงเสมือน (SMR)
กลุ่มวิจัยไอโอทีและระบบอัตโนมัติสำหรับงานอุตสาหกรรม (IIARG)
เนคเทค สวทช.
ในปัจจุบันเทคโนโลยีสแกนสามมิติ (3D scanner) มีบทบาทในภาคอุตสาหกรรมมากขึ้น เช่น การวัดความถูกต้องของชิ้นงาน การออกแบบชิ้นงานหรือผลิตภัณฑ์ใหม่ เป็นต้น และเนื่องจากชิ้นงานในภาคอุตสาหกรรมเป็นชิ้นงานแบบสามมิติ การออกแบบอุปกรณ์ที่เกี่ยวข้องกับชิ้นส่วนเหล่านี้จำเป็นต้องมีการวาดแบบจำลองสามมิติในคอมพิวเตอร์เสียก่อน แต่มีความลำบากในการในการวัดชิ้นงานที่ซับซ้อน และไม่สามารถวัดขนาดได้อย่างถูกต้องด้วยเครื่องมือวัดทั่วไป ทำให้การวาดแบบมีความไม่แม่นยำ ดังนั้นเทคโนโลยีสแกนสามมิติจึงเข้ามาช่วยเสริมการทำงานในส่วนนี้
สแกนเนอร์สามมิติคือเครื่องมือที่ใช้ในการเก็บภาพและรายละเอียดจากวัตถุ แล้วนำส่งข้อมูลเหล่านี้ไปยังคอมพิวเตอร์ในรูปแบบของพอยท์คลาวด์ (Point cloud) ซึ่งเป็นกลุ่มของจุดขนาดเล็กในพิกัด X, Y, Z ในแกน 3 มิติ โดยซอฟต์แวร์จะทำการแปลงจุดเหล่านี้ให้เป็นโพลีกอน (สามเหลี่ยม) ขนาดเล็ก ๆ ที่ต่อเนื่องกัน เพื่อแสดงพื้นผิวของวัตถุนั้น ความแม่นยำของการสแกนขึ้นอยู่กับความละเอียดของเครื่องสแกนเนอร์สามมิติ
ชนิดของสแกนเนอร์สามมิติ
เทคโนโลยีสแกนเนอร์สามมิติมีหลายประเภทดังนี้
- สแกนเนอร์แบบสัมผัส (Contact) เป็นเครื่องสแกนเนอร์ที่อาศัยหัววัด เคลื่อนที่สัมผัสไปบนผิววัตถุ อาจจะทำด้วยมือ หรือทำอัตโนมัติด้วยเครื่องซีเอ็มเอ็ม (CMM, Coordinate Measuring Machine) เพื่อวัดพิกัดของจุดบนพื้นผิว เครื่องลักษณะนี้มีความละเอียดสูง แต่ใช้เวลาการทำงานค่อนข้างมาก
- สแกนเนอร์แบบไม่สัมผัสแอคทีฟ (Non-contact active) เป็นสแกนเนอร์ที่ยิงลำแสงเช่น เลเซอร์หรือรูปแบบของแสงไฟ (Structured light) เข้าไปยังวัตถุ แล้วจับการสะท้อนกลับมายังกล้อง ข้อมูลระยะเวลาการเดินทางของเลเซอร์หรือภาพที่เกิดจากการฉายลำแสง เหล่านี้จะถูกใช้ในการคำนวณระยะห่างจากกล้องและวัตถุ สแกนเนอร์ชนิดนี้นิยมใช้เพื่อเก็บข้อมูลที่ใช้ในอุตสาหกรรม ตัวอย่างดังรูปที่ 1
- สแกนเนอร์แบบไม่สัมผัสพาสซีฟ (Non-contact passive) เป็นการใช้ข้อมูลจากภาพของกล้องถ่ายรูปหรือกล้องถ่ายวิดีโอในหลายมุม นำไปผ่านโปรแกรม Photogrammetry โดยโปรแกรมนำจุดที่เหมือนกันของภาพต่าง ๆ มาซ้อนทับกันแล้วจากนั้นจึงสร้างพื้นผิวจำลองขึ้น วิธีนี้ใช้ภาพจำนวนมากและความละเอียดขึ้นอยู่กับคุณภาพของของเซ็นเซอร์ และสภาพแสง
- สแกนเนอร์แบบโวลุ่มเมตริก (Volumetric technics) เป็นเครื่องสแกนเนอร์ที่ใช้งานมากทางการแพทย์ โดยการสร้างภาพสามมิติจากรังสีเอ็กซ์เรย์สองมิติเรียกว่าเครื่องเอ็กซ์เรย์คอมพิวเตอร์ (CT scan) หรือใช้คลื่นแม่เหล็กไฟฟ้าในเครื่อง MRI โดยเครื่องเหล่านี้มีใช้ในอุตสาหกรรมด้วยเช่นกัน เช่นการทดสอบดูภาพภายในวัสดุแบบไม่ทำลาย หรือในการทำวิศวกรรมย้อนกลับ เป็นต้น
{kind=link}
{kind=link}
รูปที่ 1 ตัวอย่างของสแกนเนอร์ (ซ้าย) แบบไม่สัมผัสแอคทีฟชนิดเลเซอร์ (ที่มา : https://www.3d-scantech.com/product/hscan331-3d-scanner) (ขวา) แบบไม่สัมผัสแอคทีฟชนิด Structured Light (ที่มา : https://www.revopoint3d.com/components-of-structured-light-handheld-3d-scanner )
การใช้งานเครื่องสแกนเนอร์สามมิติ
สแกนเนอร์สามมิติใช้ในการจับภาพวัตถุหรือสภาพแวดล้อมให้เข้ามาอยู่ในรูปแบบไฟล์ดิจิทัล สามารถนำไปใช้ทำงานต่อได้ เช่น การนำไปพิมพ์ด้วยเครื่อง 3D printer ซึ่งผู้ใช้สามารถย่อขยายโมเดลได้ตามต้องการ, นำไปใช้สร้าง CAD ใหม่เพื่อทำวิศวกรรมย้อนกลับ (Reverse engineering), การวิเคราะห์ขั้นตอนการรักษาทางการแพทย์, ออกแบบชิ้นส่วนที่ต้องเชื่อมต่อกับอุปกรณ์เดิมหรือ, นำไปแสดงผลในงาน AR/VR ได้ เป็นต้น การใช้งานสแกนเนอร์สามมิติในประเทศไทยมีตัวอย่างดังนี้ (สถาบันไทย-เยอรมัน 2022)
1. ใช้ในวิศวกรรมย้อนกลับในการการทำแม่พิมพ์ ตัวอย่างเช่น บรรจุภัณฑ์พลาสติกใส่อาหาร ผู้ใช้สามารถนำชิ้นงานสำเร็จรูปที่ต้องการทำซ้ำมาทำการสแกนสามมิติ เพื่อนำไปเป็นข้อมูลต้นทาง หลังจากนั้นใช้โปแกรม CAD ในการออกแบบแม่พิมพ์ต่อไป
2. การจำลองประติมากรรม หลังจากช่างผู้ชำนาญปั้นประติมากรรมแล้ว และสแกนสามมิติกับโมเดลที่ปั้นแล้วเสร็จ ข้อมูลเหล่านั้นสามารถนำมาย่อขยายแบบดิจิทัล แล้วสามารถนำไปทำแม่พิมพ์ หรือนำไปกัดชิ้นงานเพื่อให้ได้รูปทรงประติมากรรมในผลิตภัณฑ์ต่าง ๆ
3. การพัฒนาอุปกรณ์เชื่อมต่อกับรถทางการทหาร เช่น กรณีต้องพัฒนาอุปกรณ์เชื่อมต่อกับรถหุ้มเกราะ ที่เราไม่สามารถหาไฟล์ CAD ของรถเหล่านั้นได้ จึงใช้สแกนเนอร์แบบสามมิติเพื่อจำลองลักษณะพื้นผิวของรถหุ้มเกราะ ให้เป็นโมเดลสามมิติ แล้วจึงนำข้อมูลเหล่านี้ไปออกแบบอุปกรณ์เชื่อมต่อให้เข้ากับโมเดลรถหุ้มเกราะต่อไป
4. การตรวจสอบชิ้นงานหลังจากกระบวนการผลิต ในบางกรณีชิ้นงานที่ออกจากแม่พิมพ์หรือผ่านการกัดกลึง ต้องการการตรวจสอบก่อนนำไปทำงานในขั้นถัดไป ชิ้นงานเหล่านี้สามารถถูกตรวจสอบด้วยสแกนเนอร์สามมิติก่อนที่จะนำเข้ากระบวนการผลิตในขั้นตอนถัดไปได้
{kind=link}
{kind=link}
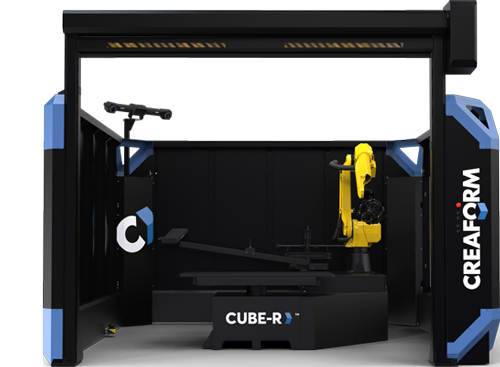
รูปที่ 2 (ซ้าย) หุ่นยนต์สแกนสามมิติของบริษัท Creaform (ที่มา : https://www.creaform3d.com/en ) (ขวา) หุ่นยนต์สแกนสามมิติของบริษัท GOM Metrology (ที่มา : https://www.gom.com)
ประโยชน์ของเทคโนโลยีสแกนสามมิติที่กล่าวมาแล้วนั้นสามารถใช้งานได้ในหลายอุตสาหกรรม แต่ส่วนใหญ่ยังเป็นการทำการสแกนด้วยมือคน ที่ผู้ใช้ต้องเคลื่อนตัวสแกนเนอร์สามมิติไปยังมุมต่าง ๆ เพื่อเก็บค่าพอยท์คลาวด์ให้ครบทุกจุด บางกรณีต้องติด Markers บนชิ้นงานก่อนการสแกนเพื่อเป็นจุดอ้างอิงในการนำข้อมูลพอยท์คลาวด์ที่ได้จากการถ่ายของมุมต่าง ๆ ของชิ้นงานมาเชื่อมต่อกัน ซึ่งขั้นตอนเหล่านี้ขึ้นอยู่กับความชำนาญของผู้ใช้ ดังนั้นจึงมีผู้นำเสนอระบบโดยใช้แขนกลติดตั้งสแกนเนอร์สามมิติเพื่อใช้ในการทำงานอัตโนมัติ เช่น บริษัท Creaform หรือบริษัท GOM Metrology ดังแสดงในรูปที่ 2 ระบบเหล่านี้สามารถช่วยเพิ่มประสิทธิภาพให้กับการทำงาน เพราะสามารถดำเนินการสแกนได้เร็วขึ้นสามารถติดตั้งเข้ากับระบบอัตโนมัติในโรงงานได้ อย่างไรก็ตามผู้ใช้ยังต้องกำหนดตำแหน่งสำหรับสแกนเพื่อให้แขนกลเคลื่อนที่ไปยังตำแหน่งเก็บข้อมูล การทำงานในลักษณะนี้ใช้เวลาตั้งค่าในครั้งแรกค่อนข้างมาก และไม่เหมาะกับงานที่มีชิ้นงานหลากหลาย หรืองานที่มีวงจรการผลิตที่สั้น เพราะทุกครั้งที่มีการเปลี่ยนชิ้นงานหมายถึงการตั้งค่ามุมการถ่ายชิ้นงานและรูปแบบการเคลื่อนที่ของแขนกลเพื่อให้เข้าถึงมุมการถ่ายทุกมุมทั้งหมด นอกจากนี้ระบบอัตโนมัติเหล่านี้มีราคาสูงอยู่ในหลัก 10 ล้านบาท จึงเป็นการยากที่อุตสาหกรรมขนาดกลางและเล็กจะเข้าถึงเทคโนโลยีนี้ได้
แพลตฟอร์มหุ่นยนต์สแกนสามมิติที่นำเสนอ
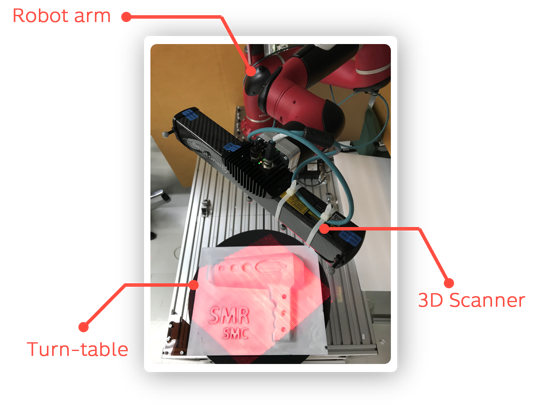
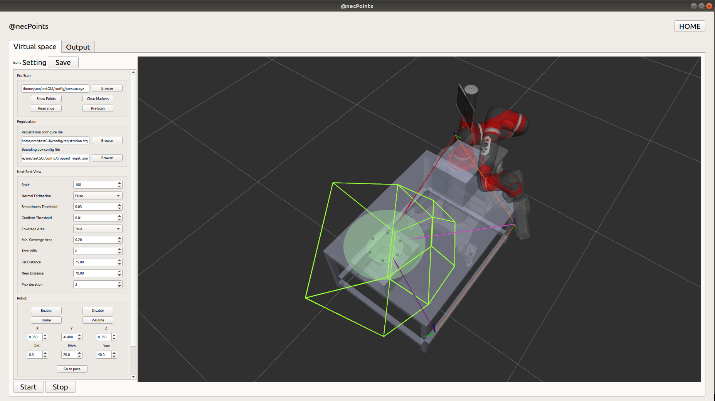
จากข้อจำกัดที่กล่าวมาแล้วศูนย์นวัตกรรมการผลิตยั่งยืน (Sustainable Manufacturing Center: SMC) ซึ่งเป็นหน่วยงานหนึ่งของ สวทช. จึงได้พัฒนาแพลตฟอร์มหุ่นยนต์สแกนและตรวจสอบชิ้นงานสามมิติขึ้น (กิ่งก้าน, et al. 2021) โดยมีส่วนประกอบสำคัญของระบบอยู่ 4 ส่วน ดังแสดงในรูปที่ 3 ได้แก่ (1) สแกนเนอร์สามมิติ (2) แขนกล (3) โต๊ะหมุน (Turn table) และ (4) ซอฟต์แวร์ที่พัฒนาขึ้น โดยการทำงานเป็นดังนี้ เริ่มจากการวางชิ้นงานที่ต้องการสแกนถูกนำมาวางบนโต๊ะหมุน โดยชิ้นงานนั้นจะมีหรือไม่มีต้นแบบ CAD ก็ได้ จากนั้นระบบจะสแกนเบื้องต้นเพื่อให้ได้ข้อมูลพอยท์คลาวด์คร่าว ๆ ของชิ้นงาน จากนั้นซอฟต์แวร์จะคำนวณหามุมมองที่ดีที่สุด (Next-Best-View) สำหรับสแกนโดยอัตโนมัติเพื่อให้ได้ข้อมูลพอยท์คลาวด์ของชิ้นงานโดยครบถ้วน โดยมีการพิจารณาพื้นที่ซ้อนทับ (Coverage area) เพื่อช่วยลดจำนวนมุมมองที่จะต้องทำการสแกน ซึ่งจะทำให้การสแกนเสร็จเร็วยิ่งขึ้น ในโครงการนี้นักวิจัยเลือกใช้หุ่นยนต์ Sawyer robot และ สแกนเนอร์สามมิติ รุ่น PhoXi 3D Scanner M ซึ่งเป็นชนิดไม่สัมผัสแบบแอคทีฟที่ใช้ Structured light เพื่อทำการพัฒนาต้นแบบ และซอฟต์แวร์ที่พัฒนาขึ้นทำงานบน ROS (Robot Operation System) ซึ่งเป็นระบบปฏิบัติการสำหรับหุ่นยนต์ระบบเปิด ในต้นแบบที่ทำการพัฒนาขึ้นมีคุณสมบัติดังนี้
- สามารถสแกนชิ้นงานได้ทั้งกรณีที่วัตถุมีต้นแบบ CAD และไม่มีต้นแบบ CAD
- ระบบสามารถสร้างการเคลื่อนที่ได้โดยอัตโนมัติเพื่อสแกนชิ้นงานรูปร่างต่าง ๆ โดยไม่ต้องกำหนดตำแหน่งการเคลื่อนที่ของแขนกล และไม่ต้องติดตั้ง Markers
- รองรับชิ้นงานที่มีขนาดเส้นผ่าศูนย์กลาง 8-50 เซนติเมตร สูง 8-30 เซนติเมตร น้ำหนักไม่เกิน 30 กิโลกรัม
- ความแม่นยำของระยะระหว่างจุดของข้อมูลพอยท์คลาวด์ อยู่ระหว่าง 150-250 ไมครอน
- ใช้เวลาในการสแกนเฉลี่ย 8-15 นาทีขึ้นอยู่กับความซับซ้อนของชิ้นงาน
{kind=link}
{kind=link}
รูปที่ 3 ระบบหุ่นยนต์สแกนสามมิติที่ถูกพัฒนาขึ้นมา ประกอบด้วย
(ซ้าย) สแกนเนอร์สามมิติ, แขนกล, โต๊ะหมุน และ (ขวา) ซอฟต์แวร์ที่พัฒนาขึ้น
จุดเด่นของแพลตฟอร์มนี้ คือซอฟต์แวร์สามารถปรับเปลี่ยนให้เข้ากับความต้องการของอุตสาหกรรมแต่ละประเภท ระบบมีความยืดหยุ่นที่สามารถปรับเปลี่ยนองค์ประกอบหลักทั้ง 3 ตัว คือ สแกนเนอร์สามมิติ แขนกล และโต๊ะหมุน ให้เป็นรุ่นหรือยี่ห้อต่าง ๆ ที่เหมาะสมกับประเภทของงานที่ต้องการและตามงบประมาณที่มีได้ โดยสแกนเนอร์สามมิติที่นำมาใช้งานในระบบต้องมี API หรือ SDK ที่สามารถใช้ในการควบคุมการทำงานได้ และแขนกลต้องรองรับ ROS ตัวอย่างของอุปกรณ์ที่สามารถใช้งานได้ในแพลตฟอร์มที่นำเสนอแสดงดังรูปที่ 4
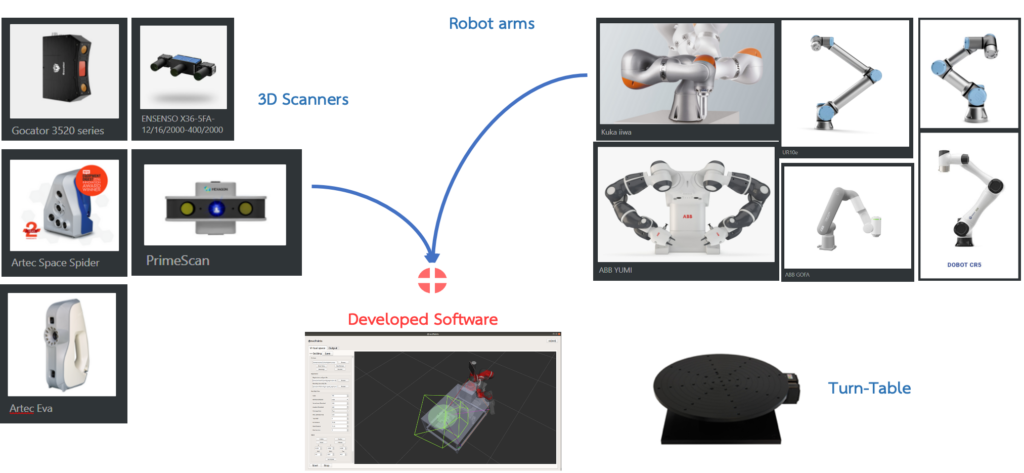
รูปที่ 4 ตัวอย่างของอุปกรณ์ที่สามารถใช้งานได้ในแพลตฟอร์มที่พัฒนาขึ้น
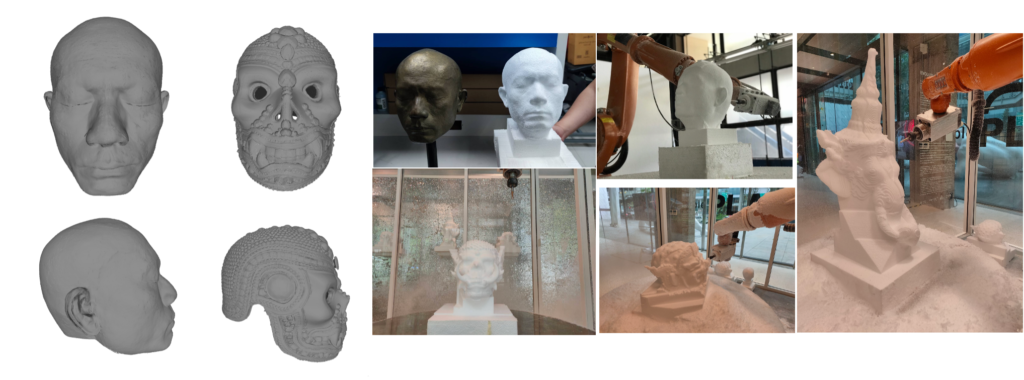
รูปที่ 5 ตัวอย่างการนำสแกนเนอร์สามมิติไปใช้สำหรับการสแกนหัวโขน
และการกัดชิ้นงานโดยแขนกลของ ม.เกษตรศาสตร์
ปัจจุบันงานวิจัยหุ่นยนต์สแกนสามมิติวิจัยแล้วเสร็จในเฟสแรก ต้นแบบสามารถใช้งานสำหรับการตรวจสอบชิ้นงานและเก็บค่าพอยท์คลาวด์เพื่อไปสร้างไฟล์ CAD ต่อได้ และระบบที่นำเสนอสามารถปรับให้มีความเหมาะสมตามคุณสมบัติที่ต้องการและงบประมาณที่มี สำหรับท่านที่สนใจสามารถติดต่อเพื่อเยี่ยมชมหรือนำชิ้นงานมาทดลองสแกนด้วยต้นแบบระบบสแกนเนอร์สามมิติเพื่อทดสอบกับปัญหาของท่านได้ที่ศูนย์นวัตกรรมการผลิตยั่งยืน
เอกสารอ้างอิง
- สถาบันไทย-เยอรมัน. 2022. “รายงานฉบับสมบูรณ์ : โครงการสำรวจและวิเคราะห์ตลาดและความต้องการ เทคโนโลยี 3D scanner ของประเทศไทย เสนอต่อ ศูนย์เทคโนโลยีอิเล็กทรอนิกส์และคอมพิวเตอร์แห่งชาติ.”
- เชิดศักดิ์ กิ่งก้าน, ธีศิษฎ์ ลีลาสวัสดิ์สุข, สิริชัย นิธิอุทัย, และ ศักย์ปณชัย เกศสิชาปกรณ์. 2021. “ระบบสแกนชิ้นงานแบบ 3 มิติ โดยการหามุมที่ดีที่สุดในการสแกนแบบอัตโนมัติโดยใช้กล้องตรวจจับการเคลื่อนไหว.”
ดาวน์โหลดเอกสารเผยแพร่
