
บทความ : ดร.ฤเชาว์ ภู่ประดับศิลป์
ทีมวิจัยมอเตอร์และการแปลงผันกำลังงาน (MAP)
กลุ่มวิจัยการควบคุมและอิเล็กทรอนิกส์ขั้นสูง (ACERG)
เนคเทค สวทช.
หัวใจหลักที่สำคัญของยานยนต์คือระบบขับเคลื่อนซึ่งยานยนต์แบบเดิมที่ใช้น้ำมันมีเครื่องยนต์สันดาบภายในเป็นส่วนประกอบหลักของระบบ ในขณะที่ปัจจุบันยานยนต์ไฟฟ้ามีแนวโน้มใช้งานเพิ่มมากขึ้นและเป็นอนาคตที่จะมาแทนที่ยานยนต์แบบเดิมที่ใช้น้ำมันเป็นเชื้อเพลิง ยานยนต์ไฟฟ้าใช้ไฟฟ้าเป็นแหล่งพลังงานดังนั้นระบบขับเคลื่อนจึงมีลักษณะแตกต่างออกไปจากระบบเดิม ระบบขับเคลื่อนของยานยนต์ไฟฟ้ามีส่วนประกอบหลักที่สำคัญคือมอเตอร์ไฟฟ้า โดยมอเตอร์ไฟฟ้าจะเปลี่ยนพลังงานไฟฟ้าซึ่งได้จากแบตเตอรี่ไปเป็นพลังงานกลในการหมุนล้อทำให้ยานยนต์ไฟฟ้าสามารถเคลื่อนที่และเบรกหยุดได้
มอเตอร์ไฟฟ้าที่ใช้งานในยานยนต์ไฟฟ้าต้องการมอเตอร์ไฟฟ้าที่มีประสิทธิภาพสูงโดยสามารถทำงานในย่านความเร็วที่กว้าง ให้แรงบิดสูง ความน่าเชื่อถือสูงในการทนทานต่อการทำงานที่ผิดปกติ ต้นทุนการผลิตต่ำ เป็นต้น ทั้งนี้ มอเตอร์ไฟฟ้าแต่ละชนิดจะมีข้อดีและข้อเสียแตกต่างกันไป ดังนั้นการเลือกมอเตอร์ไฟฟ้าสำหรับการใช้งานในแต่ละประเภทจึงจำเป็นต้องมีการเลือกจุดเด่นในด้านต่างๆ อย่างเหมาะสม สำหรับคุณลักษณะ จุดเด่นและจุดด้อยของมอเตอร์ไฟฟ้าแต่ละชนิดที่นิยมใช้ในยานยนต์ไฟฟ้า [1]–[5] มีรายละเอียดดังนี้
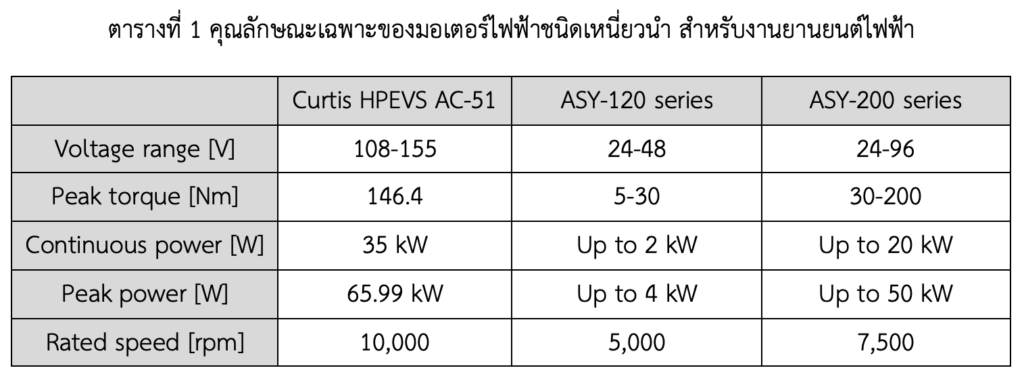
- มอเตอร์ไฟฟ้าชนิดเหนี่ยวนำ (Induction Motor; IM)
มอเตอร์ไฟฟ้าชนิดนี้ใช้หลักการทำงานของหม้อแปลงไฟฟ้า (Transformer) โดยป้อนพลังงานไปที่ขดลวดบนสเตเตอร์ ทำให้เกิดสนามเหล็กหมุนที่สเตเตอร์ จากนั้น จึงเกิดการเหนี่ยวนำไปยังโรเตอร์ ซึ่งมอเตอร์ไฟฟ้าชนิดนี้ มีใช้งานอย่างแพร่หลายในงานอุตสาหกรรม เนื่องจากมีจุดเด่นในเรื่องความแข็งแรงทนทานของโครงสร้าง สามารถทำให้โรเตอร์หมุนได้โดยป้อนไฟจากแหล่งจ่ายกระแสสลับได้โดยตรง โดยไม่จำเป็นต้องใช้ตัวควบคุม หรือจะใช้งานร่วมกับระบบควบคุม (Controller) ได้เช่นกัน ซึ่งมีการศึกษาวิธีควบคุมมอเตอร์ที่สามารถใช้ในงานอุตสาหกรรมได้อย่างเหมาะสม จึงเหมาะสำหรับใช้เป็นเกณฑ์มาตรฐาน (Benchmark) เพื่อใช้เปรียบเทียบกับมอเตอร์ชนิดอื่น ส่วนจุดด้อยของมอเตอร์ชนิดเหนี่ยวนำคือ มีประสิทธิภาพต่ำ โดยเฉพาะเมื่อต้องทำงานที่ความเร็วต่ำ มีแรงบิดเริ่มต้นต่ำ ค่าตัวประกอบกำลัง (Power Factor) มีค่าไม่สูงมาก กระแสไฟฟ้าที่ใช้ในตอนเริ่มหมุนสูง มีปัญหาเรื่องการเสียหายของแท่งอลูมิเนียมที่ใช้ในโรเตอร์ เป็นต้น ตัวอย่างมอเตอร์ชนิดเหนี่ยวนำที่นำมาประยุกต์ใช้ในงานยานยนต์ไฟฟ้าแสดงดังรูปที่ 1

รูปที่ 1 ตัวอย่างมอเตอร์ชนิดเหนี่ยวนำพร้อมด้วยชุดควบคุมสำหรับงานยานยนต์ไฟฟ้า
ตัวอย่างคุณลักษณะเฉพาะของมอเตอร์ชนิดเหนี่ยวนำสำหรับใช้ในยานยนต์ไฟฟ้าที่มีจำหน่ายในท้องตลาด แสดงในตารางที่ 1
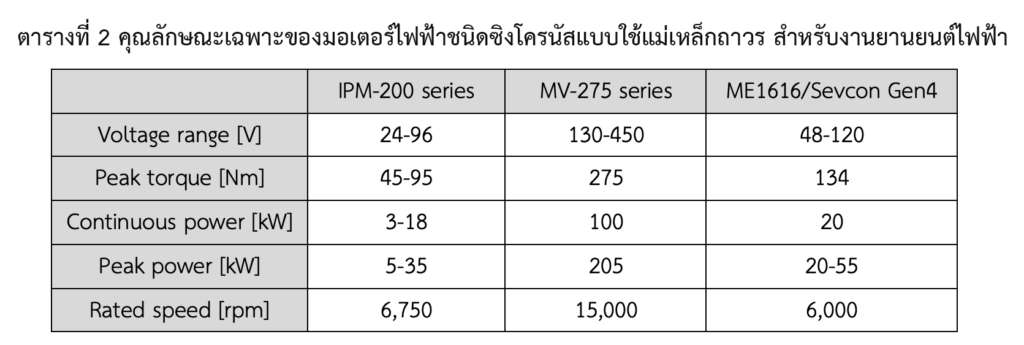
- มอเตอร์ไฟฟ้าชนิดซิงโครนัสแบบใช้แม่เหล็กถาวร (Permanent-Magnet Synchronous Motor; PMSM)
เป็นมอเตอร์ไฟฟ้าที่ใช้หลักการทำงานของสนามแม่เหล็กหมุนและมีลักษณะโครงสร้างของสเตเตอร์คล้ายคลึงกับมอเตอร์ไฟฟ้าชนิดเหนี่ยวนำ โดยป้อนกระแสไฟฟ้าสลับเข้าไปยังขดลวดของสเตเตอร์เช่นเดียวกัน ส่วนที่แตกต่างกัน คือโรเตอร์ของมอเตอร์ไฟฟ้าชนิดนี้ใช้แม่เหล็กถาวรมาเป็นส่วนประกอบเพื่อช่วยสร้างแรงสนามแม่เหล็ก ทำให้ความสูญเสียที่โรเตอร์ลดลง สนามแม่เหล็กของมอเตอร์ไฟฟ้ามีความหนาแน่นเพิ่มมากขึ้น แรงบิดสูงขึ้น ซึ่งเป็นจุดเด่นของมอเตอร์ไฟฟ้าชนิดนี้ คือ มีประสิทธิภาพสูง น้ำหนักเบา ทำให้อัตราส่วนระหว่างแรงบิดต่อน้ำหนักเพิ่มสูงขึ้น อีกทั้งแรงเฉื่อย (Inertia) น้อย ทำให้เหมาะสำหรับงานที่ต้องการการตอบสนองอย่างทันทีทันใด (High dynamic response) สำหรับจุดด้อยของมอเตอร์ไฟฟ้าชนิดนี้ คือ ต้นทุนที่ค่อนข้างแพง เนื่องจากราคาของแม่เหล็กถาวรที่สูงเนื่องจากต้องใช้แม่เหล็กที่มีคุณภาพสูง นอกจากนี้ การเปลี่ยนแปลงของราคาแม่เหล็กในตลาดโลกอย่างรวดเร็วทำให้เกิดความเสี่ยงที่อาจจะส่งผลกระทบต่อต้นทุนราคาของมอเตอร์ไฟฟ้าโดยรวม อีกทั้งแม่เหล็กถาวรมีโอกาสที่จะสูญเสียคุณสมบัติของแม่เหล็ก เมื่อต้องใช้งานที่อุณหภูมิสูงหรือเกิดการลัดวงจรไฟฟ้าขึ้นในมอเตอร์ไฟฟ้า อย่างไรก็ตามมอเตอร์ไฟฟ้าชนิดนี้เป็นที่นิยมอย่างแพร่หลายในการนำมาใช้ในงานยานยนต์ไฟฟ้าเนื่องด้วยมอเตอร์ไฟฟ้ามีขนาดเล็ก, ให้แรงบิดสูง, และมีประสิทธิภาพสูง ตัวอย่างของมอเตอร์ไฟฟ้าชนิดนี้ในงานยานยนต์ไฟฟ้าแสดงดังรูปที่ 2

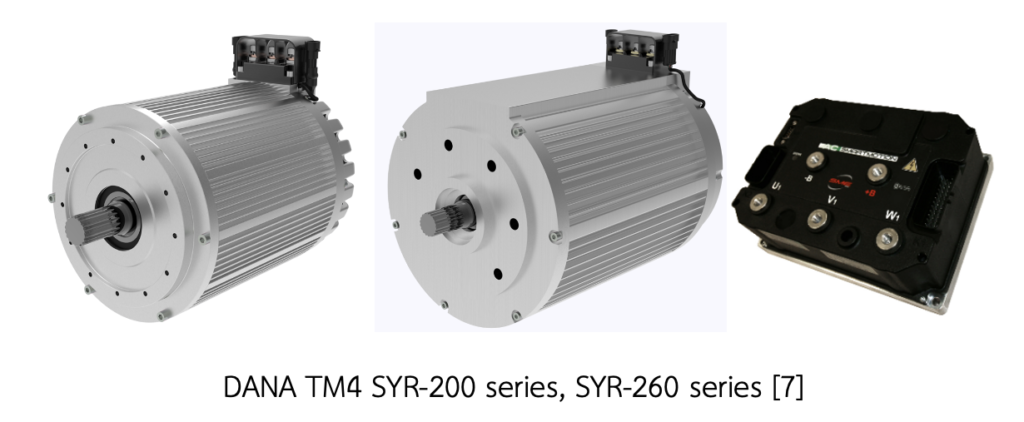
รูปที่ 2 ตัวอย่างมอเตอร์ไฟฟ้าชนิดซิงโครนัสแบบใช้แม่เหล็กถาวร
พร้อมด้วยชุดควบคุม สำหรับใช้งานในยานยนต์ไฟฟ้า
ตัวอย่างคุณลักษณะเฉพาะของมอเตอร์ไฟฟ้าชนิดซิงโครนัสแบบใช้แม่เหล็กถาวรสำหรับใช้ในยานยนต์ไฟฟ้าที่มีจำหน่ายในท้องตลาดแสดงในตารางที่ 2
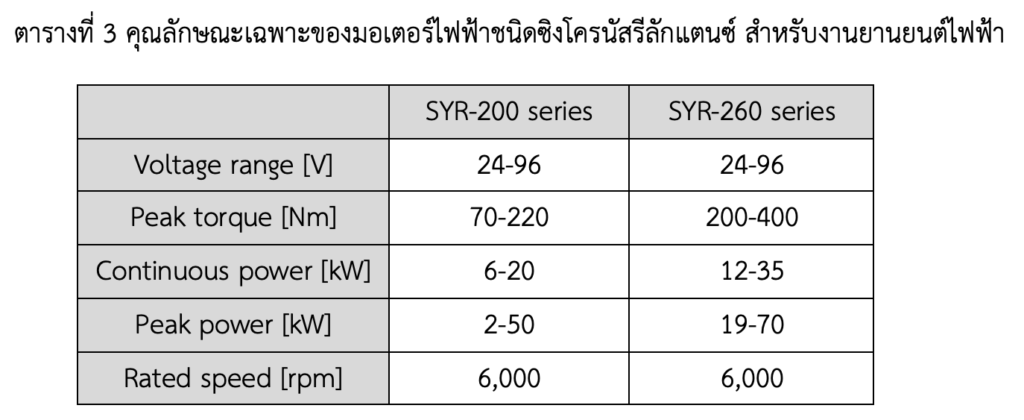
- มอเตอร์ไฟฟ้าชนิดซิงโครนัสรีลักแตนซ์ (Synchronous Reluctance Motor)
เป็นมอเตอร์ไฟฟ้าที่ใช้หลักการทำงานของสนามแม่เหล็กหมุนและมีลักษณะโครงสร้างของสเตเตอร์คล้ายคลึงกับมอเตอร์ไฟฟ้าชนิดเหนี่ยวนำและมอเตอร์ไฟฟ้าชนิดซิงโครนัสแบบใช้แม่เหล็กถาวร โดยมีการป้อนกระแสไฟฟ้าสลับที่สเตเตอร์เช่นเดียวกัน แตกต่างกันที่โรเตอร์ของมอเตอร์ไฟฟ้าชนิดซิงโครนัสรีลักแตนซ์จะไม่มีการใส่ขดลวด แท่งอลูมิเนียม หรือแม่เหล็กถาวร โดยโรเตอร์ของมอเตอร์ชนิดนี้ จะมีการออกแบบรูปร่างของตัวกั้นทางเดินสนามแม่เหล็ก (Magnetic flux barrier) เพื่อให้เกิดแรงรีลักแตนซ์ (Reluctance force) ทำให้มอเตอร์หมุน โดยจุดเด่นของมอเตอร์ชนิดนี้ คือ ประสิทธิภาพและตัวประกอบกำลังจะใกล้เคียงหรือดีกว่ามอเตอร์ไฟฟ้าชนิดเหนี่ยวนำ แต่จะต่ำกว่ามอเตอร์ไฟฟ้าชนิดซิงโครนัสแบบใช้แม่เหล็กถาวร ต้นทุนการผลิตของมอเตอร์ไฟฟ้าชนิดนี้ จะต่ำกว่ามอเตอร์ไฟฟ้าชนิดเหนี่ยวนำและมอเตอร์ไฟฟ้าชนิดซิงโครนัสแบบใช้แม่เหล็กถาวร เนื่องจากโครงสร้างที่ง่ายของโรเตอร์ซึ่งไม่มีส่วนประกอบของขดลวด, แท่งอลูมิเนียม, หรือแม่เหล็กถาวรซึ่งมีราคาสูง เข้ามาเกี่ยวข้อง สำหรับจุดด้อยของมอเตอร์ไฟฟ้าชนิดนี้ คือ การกระเพื่อมของแรงบิด (Torque Ripples) จะมีค่าค่อนข้างสูง อัตราส่วนระหว่างแรงบิดต่อน้ำหนักของมอเตอร์ไฟฟ้าชนิดนี้ จะน้อยกว่ามอเตอร์ไฟฟ้าชนิดซิงโครนัสแบบใช้แม่เหล็กถาวร ตัวอย่างของมอเตอร์ไฟฟ้าชนิดนี้ซึ่งได้มีการประยุกต์นำมาใช้ในงานยานยนต์ไฟฟ้าแสดงดังรูปที่ 3
รูปที่ 3 ตัวอย่างมอเตอร์ไฟฟ้าชนิดซิงโครนัสรีลักแตนซ์ พร้อมชุดควบคุม สำหรับงานยานยนต์ไฟฟ้า
ตัวอย่างคุณลักษณะเฉพาะของมอเตอร์ไฟฟ้าชนิดซิงโครนัสรีลักแตนซ์ สำหรับใช้ในยานยนต์ไฟฟ้าที่มีจำหน่ายในท้องตลาดแสดงในตารางที่ 3
- มอเตอร์ชนิดสวิตซ์รีลักแตนซ์ (Switched Reluctance Motor; SRM)
เป็นมอเตอร์ไฟฟ้าที่ไม่ได้ใช้หลักการทำงานของสนามแม่เหล็กหมุนเหมือนกับมอเตอร์ไฟฟ้าทั้งสามชนิดข้างต้น โดยแทนที่การป้อนไฟฟ้ากระแสสลับที่สเตเตอร์จะเปลี่ยนเป็นการป้อนกระแสไฟฟ้าเป็นรูปสี่เหลี่ยมในขดลวดของแต่ละเฟสตามตำแหน่งของโรเตอร์ โดยโรเตอร์ของมอเตอร์ไฟฟ้าชนิดนี้ จะมีลักษณะเรียบง่าย เป็นลักษณะขั้วยื่น (Salient pole) ขึ้นอยู่กับจำนวนขั้วที่ต้องการ ซึ่งจุดเด่นของมอเตอร์ไฟฟ้าชนิดนี้ คือ ต้นทุนการผลิตของมอเตอร์ไฟฟ้าชนิดนี้ จะต่ำกว่ามอเตอร์ไฟฟ้าชนิดอื่น เนื่องจากไม่มีการใช้ขดลวด, แท่งอลูมิเนียม, หรือแม่เหล็กถาวรที่โรเตอร์ นอกจากนี้ รูปร่างโรเตอร์ของมอเตอร์ไฟฟ้าชนิดนี้ จะซับซ้อนน้อยกว่ามอเตอร์ไฟฟ้าชนิดซิงโครนัสรีลักแตนซ์ ทำให้ต้นทุนการผลิตลดลงและมีความแข็งแรงทางกลมากกว่า เหมาะสำหรับใช้งานที่ความเร็วสูง สำหรับจุดด้อยของมอเตอร์ไฟฟ้าชนิดนี้คือ แรงบิดกระเพื่อม รวมทั้งการสั่นสะเทือน (Vibration) และเสียงรบกวน (Acoustic noise) ที่เกิดจากมอเตอร์ไฟฟ้าชนิดนี้ มีค่าสูงมากกว่ามอเตอร์ไฟฟ้าชนิดอื่นๆ อีกทั้งโครงสร้างของระบบควบคุมของมอเตอร์ไฟฟ้าชนิดนี้ จะแตกต่างจากมอเตอร์ไฟฟ้าทั้งสามตัวข้างต้นและไม่สามารถนำมาใช้ร่วมกันได้ มอเตอร์ไฟฟ้าชนิดนี้มีการนำมาประยุกต์ใช้ในรถบรรทุกไฟฟ้าที่วิ่งระยะทางไกลๆ ตัวอย่างมอเตอร์ไฟฟ้าชนิดนี้ดังรูปที่ 4
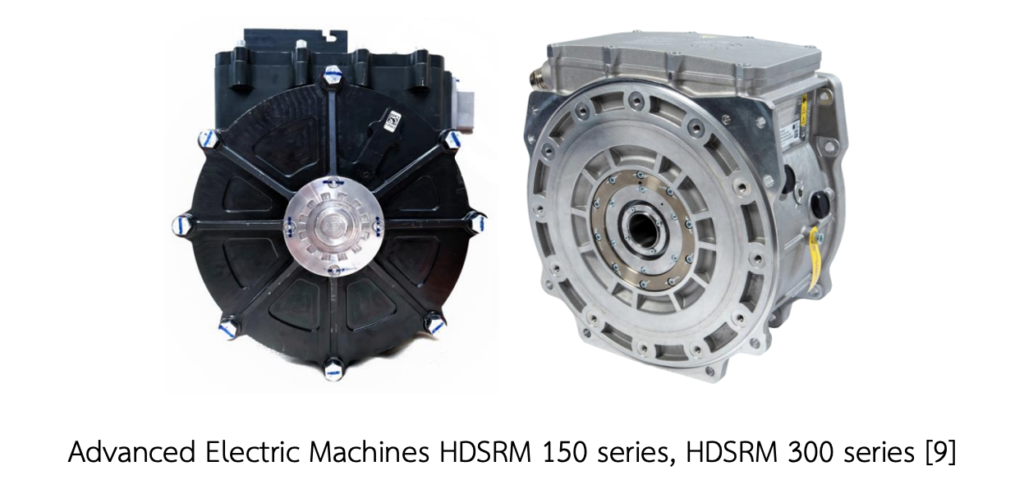
รูปที่ 4 ตัวอย่างมอเตอร์ไฟฟ้าชนิดสวิตซ์รีลักแตนซ์ ที่ถูกประยุกต์ใช้ในงานยานยนต์ไฟฟ้า
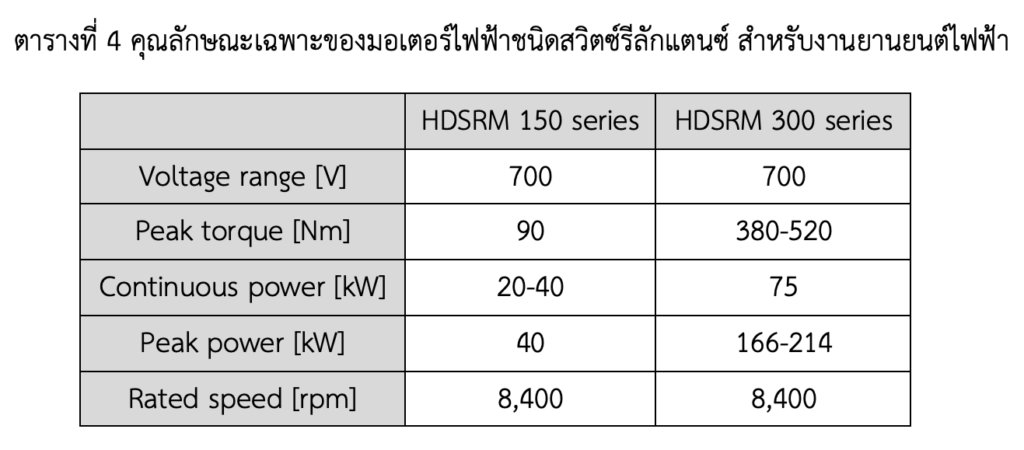
ตัวอย่างคุณลักษณะเฉพาะของมอเตอร์ไฟฟ้าชนิดสวิตซ์รีลักแตนซ์ สำหรับใช้ในยานยนต์ไฟฟ้าที่มีจำหน่ายในท้องตลาดแสดงในตารางที่ 4
- มอเตอร์ซิงโครนัสรีลักแตนซ์แบบใช้แม่เหล็กถาวร (Permanent-magnet Assisted Synchronous Reluctance Motor)
เป็นมอเตอร์ไฟฟ้าที่ใช้หลักการทำงานของสนามแม่เหล็กหมุน ซึ่งมอเตอร์ไฟฟ้าชนิดนี้ ใช้แรงบิดที่เกิดจากแรงรีลักแตนซ์เป็นหลักและใช้แรงสนามแม่เหล็กที่เกิดจากแม่เหล็กถาวรช่วยปรับปรุงให้ตัวประกอบกำลังของมอเตอร์ชนิดนี้ดีขึ้นเมื่อเปรียบเทียบกับมอเตอร์ไฟฟ้าชนิดซิงโครนัสรีลักแตนซ์ กล่าวอีกนัยคือ มอเตอร์ไฟฟ้าชนิดนี้ เป็นการเลือกใช้จุดเด่นของมอเตอร์ไฟฟ้าชนิดซิงโครนัสรีลักแตนซ์แบบใช้แม่เหล็กถาวรและมอเตอร์ไฟฟ้าชนิดซิงโครนัสรีลักแตนซ์มาประกอบรวมกัน สำหรับจุดด้อยของมอเตอร์ไฟฟ้าชนิดนี้ คือ ต้นทุนแม่เหล็กถาวรที่เพิ่มสูงขึ้น เมื่อเปรียบเทียบกับมอเตอร์ไฟฟ้าชนิดซิงโครนัสรีลักแตนซ์ แต่ต้นทุนนี้ จะต่ำกว่าเมื่อเปรียบเทียบกับมอเตอร์ไฟฟ้าชนิดซิงโครนัสแบบใช้แม่เหล็กถาวร เนื่องจากใช้จำนวนแม่เหล็กถาวรที่น้อยกว่าและเลือกใช้แม่เหล็กที่มีคุณภาพไม่สูงมากนัก ตัวอย่างของมอเตอร์ไฟฟ้าชนิดนี้ที่มีใช้ในการยานยนต์ไฟฟ้าแสดงดังรูปที่ 5
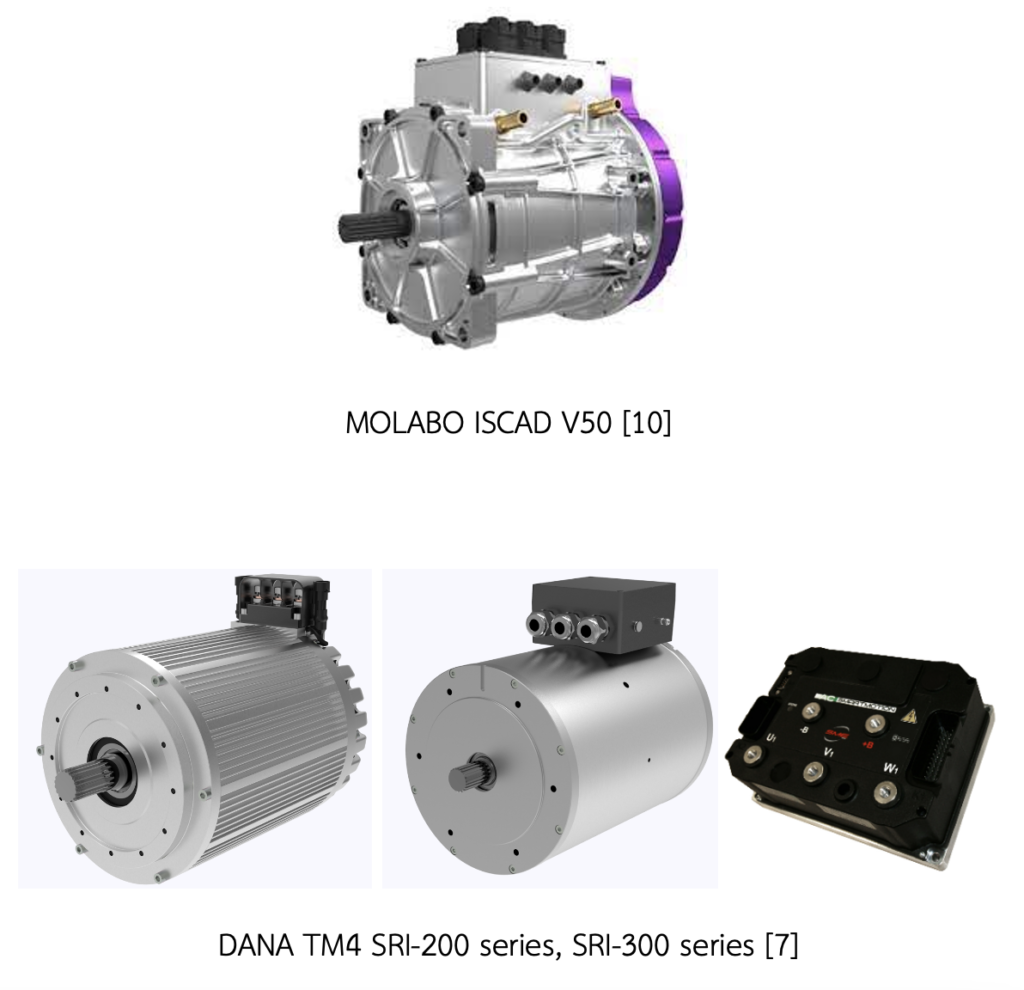
รูปที่ 5 ตัวอย่างมอเตอร์ไฟฟ้าชนิดซิงโครนัสรีลักแตนซ์แบบใช้แม่เหล็กถาวร ที่ใช้ในงานยานยนต์ไฟฟ้า
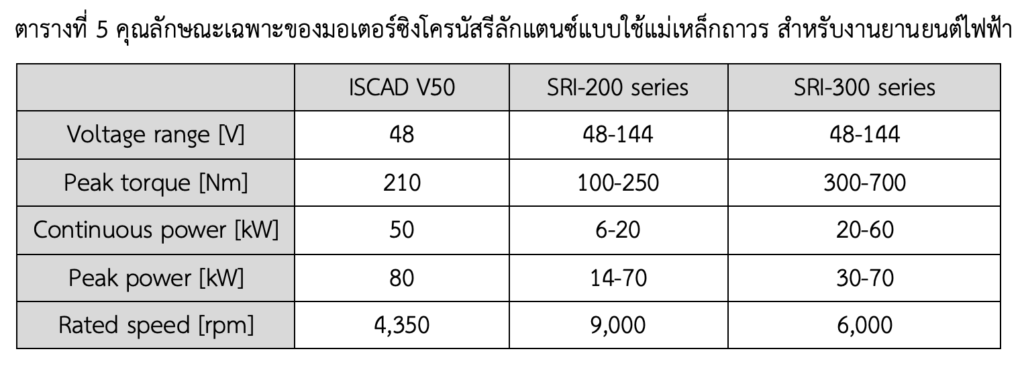
ตัวอย่างคุณลักษณะเฉพาะของมอเตอร์ไฟฟ้าชนิดซิงโครนัสรีลักแตนซ์แบบใช้แม่เหล็กถาวร สำหรับใช้ในยานยนต์ไฟฟ้าที่มีจำหน่ายในท้องตลาดแสดงในตารางที่ 5
อย่างไรก็ตามเพื่อให้ได้ขนาดกำลังและชนิดมอเตอร์ไฟฟ้าที่เหมาะสมในการเลือกมอเตอร์สำหรับยานยนต์ไฟฟ้า สิ่งที่จำเป็นต้องทราบคือพฤติกรรมการขับขี่ (Driving cycle) [11], [12] ซึ่งจะช่วยให้ทราบถึงแรงบิดและกำลังไฟฟ้าที่ตัวรถต้องการในขณะที่ทำงานจริง เพื่อให้ได้ขนาดมอเตอร์ไฟฟ้าที่เหมาะสม ซึ่งจะมีผลต่อน้ำหนักบรรทุกของรถและขนาดแบตเตอรี่ที่ตัวรถต้องการ ตัวอย่าง Driving cycle แสดงในรูปที่ 6 เป็น Driving cycle ของการขับขี่ในเมือง (FTP75 Urban) และทางไกล (FTP75 Highway) พบว่า พฤติกรรมการขับขี่ในกรณีที่วิ่งในเมืองและทางไกลจะแตกต่างกัน การขับขี่ในเมืองจะมีการเร่งและหยุดบ่อยกว่าการขับขี่ทางไกล เมื่อรู้ถึงลักษณะ Driving cycle ของการขับขี่แต่ละรูปแบบแล้วก็สามารถนำมาคำนวณหาจุดทำงานของรถ ขนาดแรงที่ต้องใช้ในการออกตัวหรือขับขี่ (Tractive effort force) ได้
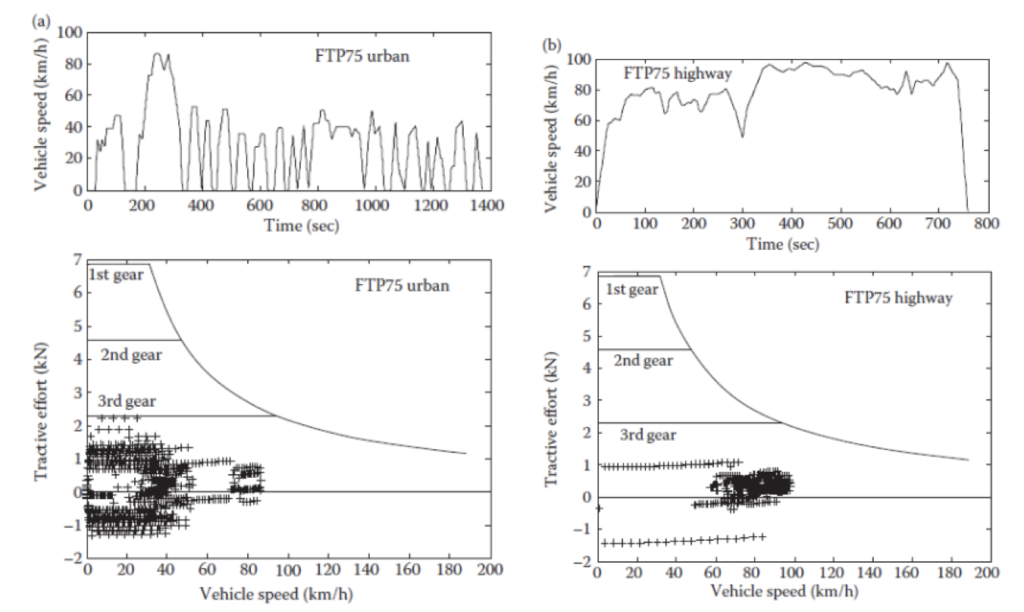
รูปที่ 6 ตัวอย่าง Driving cycle (บน) และจุดทำงาน (ล่าง)
ของการขับขี่ในเมือง Urban (ซ้าย) และการขับขี่ทางไกลบน Highway (ขวา) [13]
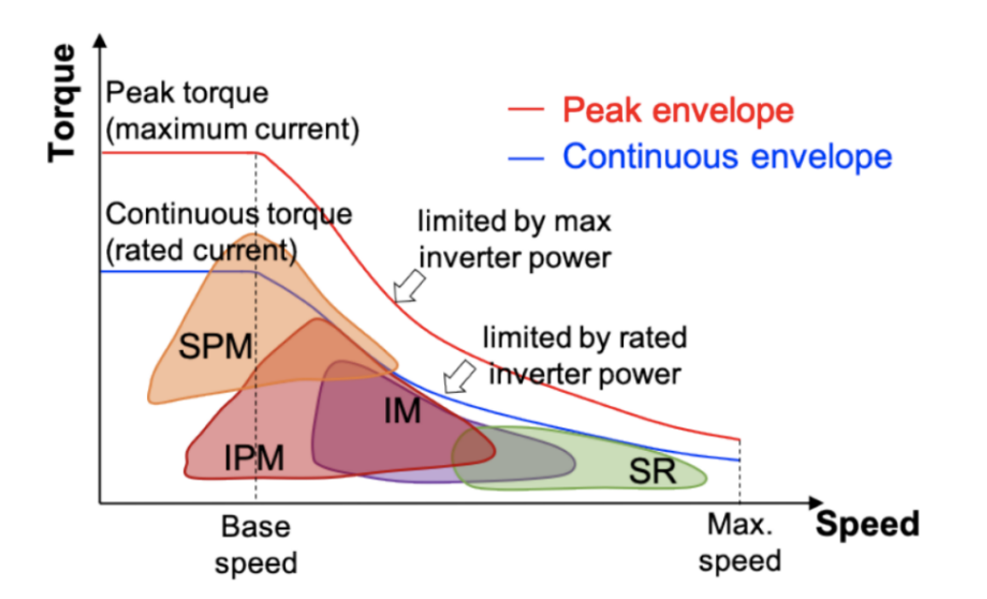
รูปที่ 7 ย่านการทำงานที่ให้ประสิทธิภาพดีที่สุดของมอเตอร์ไฟฟ้าแต่ละชนิด [5]
ในรูปที่ 7 แสดงย่านการทำงานของมอเตอร์ไฟฟ้าแต่ละชนิดที่ให้ประสิทธิภาพดีสุด ซึ่งพบว่ามอเตอร์ไฟฟ้าชนิดซิงโครนัสแบบใช้แม่เหล็กถาวร ทั้งแบบ SPM และแบบ IPM มีประสิทธิภาพการทำงานที่ย่านความเร็วต่ำได้ดีที่สุด ในขณะที่ย่านความเร็วปานกลางนั้น มอเตอร์ไฟฟ้าชนิดซิงโครนัสแบบใช้แม่เหล็กถาวร IPM และมอเตอร์ไฟฟ้าชนิดเหนี่ยวนำ สามารถทำงานได้มีประสิทธิภาพดีที่สุด และในย่านการทำงานอยู่ในช่วงความเร็วสูง มอเตอร์ไฟฟ้าชนิดสวิตซ์รีลักแตนซ์ให้ประสิทธิภาพดีที่สุด ซึ่งจากเงื่อนไขดังกล่าว ผู้ใช้งานสามารถนำไปเลือกมอเตอร์ไฟฟ้าให้เหมาะสมกับความต้องการได้มากที่สุด
เอกสารอ้างอิง
[1] M. Cheng, L. Sun, G. Buja, and L. Song, ‘Advanced Electrical Machines and Machine-Based Systems for Electric and Hybrid Vehicles’, Energies, vol. 8, no. 9, Art. no. 9, Sep. 2015, doi: 10.3390/en8099541.
[2] M. Yildirim, M. Polat, and H. Kürüm, ‘A survey on comparison of electric motor types and drives used for electric vehicles’, in 2014 16th International Power Electronics and Motion Control Conference and Exposition, Sep. 2014, pp. 218–223. doi: 10.1109/EPEPEMC.2014.6980715.
[3] E. Agamloh, A. von Jouanne, and A. Yokochi, ‘An Overview of Electric Machine Trends in Modern Electric Vehicles’, Machines, vol. 8, no. 2, Art. no. 2, Jun. 2020, doi: 10.3390/machines8020020.
[4] S. J. Rind, Y. Ren, Y. Hu, J. Wang, and L. Jiang, ‘Configurations and control of traction motors for electric vehicles: A review’, Chin. J. Electr. Eng., vol. 3, no. 3, pp. 1–17, Dec. 2017, doi: 10.23919/CJEE.2017.8250419.
[5] L. Shao, A. E. H. Karci, D. Tavernini, A. Sorniotti, and M. Cheng, ‘Design Approaches and Control Strategies for Energy-Efficient Electric Machines for Electric Vehicles—A Review’, IEEE Access, vol. 8, pp. 116900–116913, 2020, doi: 10.1109/ACCESS.2020.2993235.
[6] ‘Affordable Electric Vehicle Batteries & Components from Electric Car Parts Company’, Electric Cars Parts Company. https://www.electriccarpartscompany.com/ (accessed Aug. 22, 2022).
[7] ‘Electric motors’, Dana TM4. https://www.danatm4.com/products/electric-motors/ (accessed Aug. 22, 2022).
[8] ‘ME1616 Brushless 20 kW – 55 kW Liquid-Cooled IPM Motor 48-120V – EV PARTS’. https://www.electricmotorsport.com/me1616-brushless-65hp-liquid-cooled-ipm-motor-24-120v.html (accessed Aug. 22, 2022).
[9] A. E. Machines, ‘HDSRM’, Advanced Electric Machines. https://advancedelectricmachines.com/our-technology/hdsrm/ (accessed Aug. 22, 2022).
[10] ‘Molabo’. https://www.energy-solutions.co.uk/products/molabo (accessed Aug. 22, 2022).
[11] E. Carraro, M. Morandin, and N. Bianchi, ‘Optimization of a traction PMASR motor according to a given driving cycle’, in 2014 IEEE Transportation Electrification Conference and Expo (ITEC), Jun. 2014, pp. 1–6. doi: 10.1109/ITEC.2014.6861838.
[12] T. A. Huynh and M.-F. Hsieh, ‘Performance Analysis of Permanent Magnet Motors for Electric Vehicles (EV) Traction Considering Driving Cycles’, Energies, vol. 11, no. 6, Art. no. 6, Jun. 2018, doi: 10.3390/en11061385.
[13] M. Ehsani, Y. Gao, S. Longo, and K. Ebrahimi, Modern Electric, Hybrid Electric, and Fuel Cell Vehicles, 3rd ed. Boca Raton: CRC Press, 2018. doi: 10.1201/9780429504884.
ดาวน์โหลดเอกสารเผยแพร่
